





Новости – В мире

В мире
Роботы сбиваются в коллектив





Парад килоботов. Фото: Michael Rubenstein / Harvard University
Американские инженеры создали первую «стаю» роботов и устроили кибернетический флешмоб
15 августа, 2014 12:06
6 мин
Робототехники из нескольких университетов США создали серию автономных машин-килоботов, которые обладают коллективным сознанием и умеют по команде ученых объединяться в структуры произвольной формы и размеров, а также действовать самостоятельно. Итоги первого робофлешмоба, инструкции по сборке килоботов и управляющие ими алгоритмы были описаны в статье в журнале Science.
«Красота биологических систем, таких как многоклеточные организмы или колонии насекомых, заключается в том, что они являются изящно простыми, но при этом им удается выполнять, казалось бы, невозможные задачи благодаря большому числу членов группы. На определенном уровне вы перестаете видеть индивидуальных представителей этих коллективов и рассматриваете всю их совокупность как некий самостоятельный и цельный объект. И больше всего нас восхищают те системы, члены которых могут самоорганизовываться для решения конкретных проблем», — рассказывает Радхика Нагпал из Гарвардского университета (США).
Килоботы, созданные Нагпал и ее коллегами — это логическое продолжением другой серии роботов, которую робототехники из Гарварда создали благодаря своему увлечению термитами. Способность этих насекомых к самоорганизации и строительству гигантских по их меркам объектов безмерно восхищала и удивляла ученых.
Нагпал с коллегами на протяжении нескольких лет следили за поведением термитов и пытались раскрыть их строительные приемы и хитрости. Они выяснили, что главным секретом успеха термитов-рабочих является так называемая стигмергия — способность передавать информацию и координировать работу опосредованно, через особенности рельефа, рукотворные структуры и химические сигналы.
Американские инженеры воспроизвели эту систему беспроводной передачи информации в наборе роботов, которых они назвали Termes в честь их биологических «кузенов». Они обладают крайне примитивным набором органов чувств, которые позволяют им ощущать только строительные блоки и близлежащих коллег. Их работой управляет простой алгоритм, содержащий общие приемы строительства и правила дорожного движения. Подобная децентрализованная стройка обладает несколькими преимуществами — она продолжается даже при поломке большей части роботов, и ее масштабы можно легко менять, увеличивая или уменьшая число «термитов».
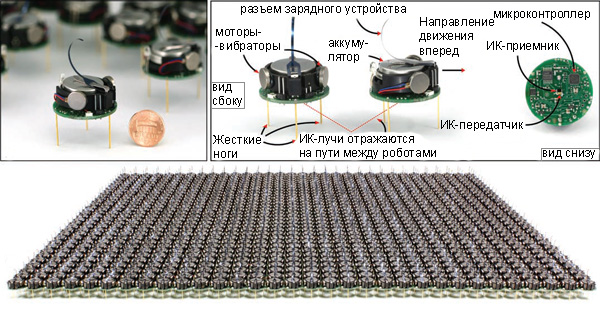
Схема устройства «килоботов». Источник: Michael Rubenstein / Science / AAAS
Схема устройства килоботов. Источник: Michael Rubenstein / Science / AAAS
Робототехники из Гарварда не остановились на этом и решили воплотить в роботах другие примеры кооперации и самоорганизации среди животных, которые можно встретить в дикой природе. К примеру, многие виды социальных амеб объединяются в большой «ком» для побега из неблагоприятной среды, а кочевые муравьи сцепляются друг с другом и образуют шар или мост, помогающий им пересечь реку. Анализируя все подобные формы поведения, авторы статьи разработали самообучающийся алгоритм, который позволяет группе роботов произвольных размеров объединяться в единое коллективное сознание и исполнять задачи, непосильные одной машине.
Ключевая особенность этой программы — во время выполнения задачи роботы на ее базе способны действовать полностью самостоятельно, без вмешательства человека. Они корректируют свои ошибки, опираясь на данные, поступающие из соседних машин. Подобный подход позволяет масштабировать число роботов в «стае» практически в неограниченных пределах, что ученые доказали, проверив работу алгоритма в виртуальной реальности.
Убедившись в работоспособности «мозгов» будущих роботов, Нагпал с коллегами приступили к разработке машин, которых они потом окрестили килоботами. Стайный характер этих роботов вынудил ученых пойти на большие упрощения, что заметно снизило стоимость роботов и индивидуальные способности, которыми они обладают.
Каждый робот представляет собой небольшую цилиндрическую коробочку, к которой подключены два вибродвигателя, три жестких и неподвижных ноги, передатчик и приемник ИК-излучения, примитивнейший микрочип и небольшой аккумулятор. По своей сути каждый такой робот является безногим и слепым в классическом понимании этих слов, что, однако, не мешает им ориентироваться и двигаться.
К примеру, роботы определяют свое положение в пространстве и расстояние до соседей по силе инфракрасного излучения от ближайших трех соседей, при помощи импульсов которого отдельные члены робостаи обмениваются данными. Кроме того, килоботы могут ползти в произвольную сторону, увеличивая мощность одного из вибраторов и снижая частоту и силу колебаний во втором моторе. Благодаря дешевизне компонентов, обе этих системы несовершенны — некоторые роботы не были способны двигаться по прямой линии, а другие ошибались с вычислением расстояния из-за чрезмерно низкой или высокой чувствительности ИК-приемника. Тем не менее, это не мешало работе всей стаи в целом, так как их коллективное сознание в виде алгоритма Нагпал и ее соратников корректировало все ошибки в движении и поведении.
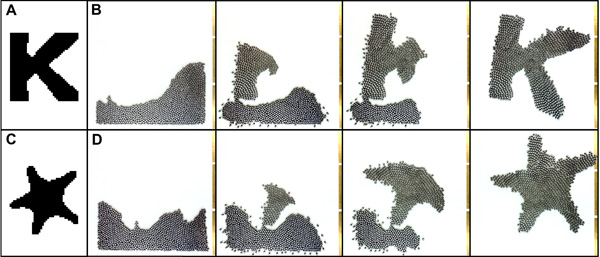
Процесс превращения стаи килоботов в букву «К» и морскую звезду. Фото: Michael Rubenstein / Harvard University
Процесс превращения стаи килоботов в букву «К» и морскую звезду. Фото: Michael Rubenstein / Harvard University
В общей сложности ученые собрали тысячу (почти килобайт) килоботов и провели первый киберфлешмоб, заставив машины объединяться в различные геометрические фигуры и формы при помощи макросов. За несколько часов, после передачи команды в один из роботов, вся стая килоботов превращалась в миниатюрную букву «К», гаечный ключ, морскую звезду и другие рисунки. Столь невысокая скорость работы роботов не огорчила ученых — для них главным была экспериментальная проверка алгоритма, который потенциально позволяет управлять движением и действиями миллионов роботов и других видов машин.
Что интересно, все исходники, инструкции по сборке роботов и прочие детали экспериментов ученые выложили в открытый доступ на сайте Инженерной и прикладной школы Гарварда (SEAS), где работают авторы статьи. Как надеются инженеры, их шаг позволит всему научному сообществу продвинуться в создании полностью самостоятельных микророботов, способных исполнять масштабные задачи.
«В будущем мы будем все больше и больше опираться на роботов, работающих в коллективном режиме. Примерами подобных машин могут стать тысячи роботов, объединяющих свои усилия для расчистки нефтяных пятен и других загрязнений, а также и миллионы автомобилей на дорогах, движущиеся без участия пассажиров. Самое важное для нас — понять, как научиться создавать алгоритмы, способные работать в таких масштабах», — заключает Нагпал.
поддержать проект
Подпишитесь на «Русскую Планету» в Яндекс.Новостях
Яндекс.Новости





