





Новости – В мире

В мире
Роботизированная саранча




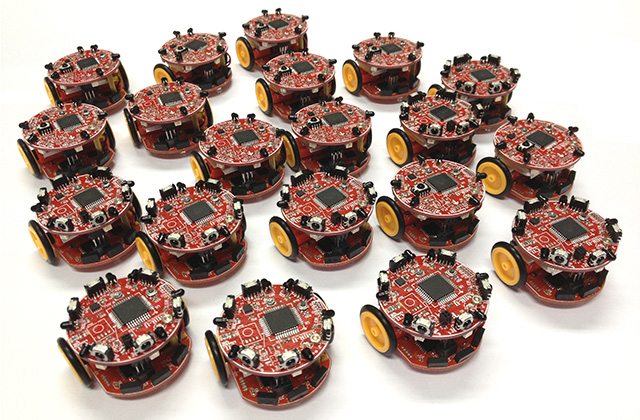
Роботы Colias. Фото: lincoln.ac.uk
Новые маленькие роботы могут сбиваться в рой и имитировать поведение пчел
22 сентября, 2014 15:34
4 мин
Американские и китайские инженеры создали в рамках совместного проекта маленьких роботов, способных сбиваться в рой и имитировать поведение пчел. Платформа получила название Colias в честь дневных бабочек-желтушек. Она предназначена для выработки и проверки работы алгоритмов, основанных на поведении живых существ.
Диаметр каждого из роботов составляет всего 4 см, а скорость — 35 см/с. Такое устройство сообщается с другими автоматами при помощи шести инфракрасных датчиков, способных работать на расстоянии от 0,5 см до 2 м.
Colias оснащены специальными детекторами препятствий, на создание которых инженеров вдохновила нервная система саранчи. Это насекомое избегает прямого столкновения благодаря особому нейронному центру, связанному с глазами особи. Он мгновенно реагирует на крупный предмет впереди и работает параллельно с другими центрами обработки сигналов от органов чувств, позволяя немедленно сменить направление движения.
Как говорит один из разработчиков платформы, Фаршад Арвин, Colias способны имитировать поведение роев и стай насекомых, рыб и птиц. «Эта концепция основана на случайной координации движений простых роботов, которые способны сообща выполнять большие задачи», — поясняет он. В качестве программного обеспечения для Colias используется алгоритм BEECLUST, имитирующий поведение пчелы в рое.
Такая разработка — не единственная в своем роде. В августе этого года робототехники из нескольких университетов США представили серию автономных машин-килоботов, которые обладают коллективным сознанием и умеют по команде ученых объединяться в структуры произвольной формы и размеров, а также действовать самостоятельно.
Инженеры на протяжении нескольких лет следили за поведением термитов и пытались раскрыть их строительные приемы и хитрости. Они выяснили, что главным секретом успеха термитов-рабочих является так называемая стигмергия — способность передавать информацию и координировать работу опосредованно, через особенности рельефа, рукотворные структуры и химические сигналы.
Американские инженеры воспроизвели эту систему беспроводной передачи информации в наборе роботов, которых они назвали Termes. Эти автоматы обладают примитивным набором органов чувств, которые позволяют им ощущать только строительные блоки и ближайших коллег.
Их работой управляет простой алгоритм, содержащий общие приемы строительства и правила дорожного движения. Подобная децентрализованная стройка обладает несколькими преимуществами — она продолжается даже при поломке большей части роботов, и ее масштабы можно легко менять, увеличивая или уменьшая число устройств.
Другой проект, SMAVNET, позволяет управлять «роями» летающих беспилотников, способных разворачивать беспроводные сети для доступа в интернет над удаленными от цивилизации районами. В качестве прообраза алгоритма, управляющего дронами, его разработчики использовали поведение муравьев, прокладывающих феромонные дорожки от муравейника к источнику пищи. Эти маркеры позволяют им ориентироваться в пространстве.
Роботы SMAVNET также используют для сообщения друг с другом не внешние ориентиры, а собственную систему ориентации. После начала движения роботы один за другим выстраиваются в цепочку на одинаковом расстоянии друг от друга.
Но все уже существующие проекты роботизированных «роев» имеют свои недостатки, и самый главный из них — высокая стоимость таких систем. В отличие от них, один Colias стоит $41, что позволяет использовать этих маленьких роботов даже в проектах, ограниченных по финансовым средствам.
Диаметр каждого из роботов составляет всего 4 см, а скорость — 35 см/с. Такое устройство сообщается с другими автоматами при помощи шести инфракрасных датчиков, способных работать на расстоянии от 0,5 см до 2 м.
Colias оснащены специальными детекторами препятствий, на создание которых инженеров вдохновила нервная система саранчи. Это насекомое избегает прямого столкновения благодаря особому нейронному центру, связанному с глазами особи. Он мгновенно реагирует на крупный предмет впереди и работает параллельно с другими центрами обработки сигналов от органов чувств, позволяя немедленно сменить направление движения.
Как говорит один из разработчиков платформы, Фаршад Арвин, Colias способны имитировать поведение роев и стай насекомых, рыб и птиц. «Эта концепция основана на случайной координации движений простых роботов, которые способны сообща выполнять большие задачи», — поясняет он. В качестве программного обеспечения для Colias используется алгоритм BEECLUST, имитирующий поведение пчелы в рое.
Такая разработка — не единственная в своем роде. В августе этого года робототехники из нескольких университетов США представили серию автономных машин-килоботов, которые обладают коллективным сознанием и умеют по команде ученых объединяться в структуры произвольной формы и размеров, а также действовать самостоятельно.
Инженеры на протяжении нескольких лет следили за поведением термитов и пытались раскрыть их строительные приемы и хитрости. Они выяснили, что главным секретом успеха термитов-рабочих является так называемая стигмергия — способность передавать информацию и координировать работу опосредованно, через особенности рельефа, рукотворные структуры и химические сигналы.
Американские инженеры воспроизвели эту систему беспроводной передачи информации в наборе роботов, которых они назвали Termes. Эти автоматы обладают примитивным набором органов чувств, которые позволяют им ощущать только строительные блоки и ближайших коллег.
Их работой управляет простой алгоритм, содержащий общие приемы строительства и правила дорожного движения. Подобная децентрализованная стройка обладает несколькими преимуществами — она продолжается даже при поломке большей части роботов, и ее масштабы можно легко менять, увеличивая или уменьшая число устройств.
Другой проект, SMAVNET, позволяет управлять «роями» летающих беспилотников, способных разворачивать беспроводные сети для доступа в интернет над удаленными от цивилизации районами. В качестве прообраза алгоритма, управляющего дронами, его разработчики использовали поведение муравьев, прокладывающих феромонные дорожки от муравейника к источнику пищи. Эти маркеры позволяют им ориентироваться в пространстве.
Роботы SMAVNET также используют для сообщения друг с другом не внешние ориентиры, а собственную систему ориентации. После начала движения роботы один за другим выстраиваются в цепочку на одинаковом расстоянии друг от друга.
Но все уже существующие проекты роботизированных «роев» имеют свои недостатки, и самый главный из них — высокая стоимость таких систем. В отличие от них, один Colias стоит $41, что позволяет использовать этих маленьких роботов даже в проектах, ограниченных по финансовым средствам.
поддержать проект
Подпишитесь на «Русскую Планету» в Яндекс.Новостях
Яндекс.Новости





