





Новости – В мире

В мире
Противораковые ходоки




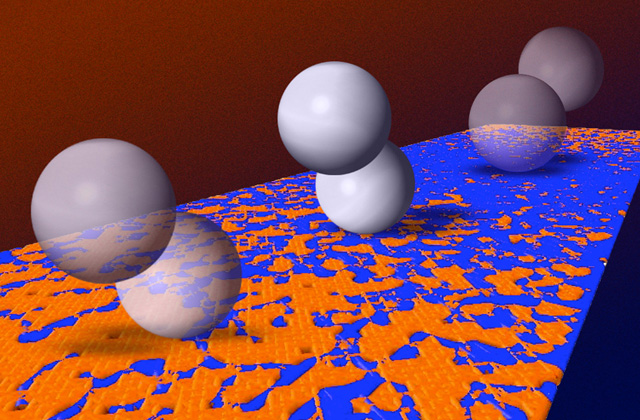
Микроскопические «роботы» передвигаются по искусственной поверхности клетки. Источник: MIT
У микроскопических механизмов, способных доставлять лекарственные препараты к раковым клеткам, появилась система навигации
27 октября, 2014 12:23
3 мин
Ученые Массачусетского технологического института (США) сделали первый шаг в разработке микроскопических механизмов, способных передвигаться подобно клеткам и микроорганизмам в теле живого существа. Подобные роботы будут использоваться для доставки лекарственных препаратов к конкретным органам и для поиска злокачественных опухолей.
У клеток и микроорганизмов есть рецепторы определенных химических соединений, с помощью которых они выясняют, куда именно им необходимо двигаться. Например, благодаря им белые кровяные клетки выявляют, где болезнетворные патогены атакуют организм, а одноклеточные плывут по направлению к источнику пищи
По словам одного из авторов исследования Альфредо Александра-Каца, он и его коллеги хотели создать «синтетическую активную систему», способную на хемотаксис — изменение движения микроорганизма под воздействием определенных внешних факторов. Он подчеркивает, что подобного механизма для искусственных микроскопических механизмов до сей поры не существовало.
В своей работе специалисты использовали две крохотные магнитные частицы, передвигающиеся по условной искусственной поверхности клетки. Они наблюдали, как эти частицы под воздействием перемещающегося магнитного поля двигались из областей с низким сцеплением к областям с высоким сцеплением.
Комплекс «шагал», переваливаясь с одного магнитного объекта на другой — сначала «шаг» делала первая частица, потом вторая. Области поверхности с высоким сцеплением символизировали регионы скопления рецепторов клетки, и именно к ним «шагали» микророботы, минуя обрасти поверхности с низким сцеплением.
Система, созданная авторами работы, состояла из двух магнитных частиц, покрытых белком стрептавидином, вырабатываемым бактерией Streptomyces avidinii, и основы с нанесенным на нее биотином (витамном В).
Для создания на подложке областей с высоким сцеплением ученые использовали авидин — сложный белок, являющийся антагонистом биотина и образующий с ним неактивный комплекс. Он наносился на поверхность в очень маленькой капле воды объемом 50 микролитров, содержащий этот белок в концентрации 1 миллиграмм на миллилитр. Затем вода испарялась, и на подложке оставался только авидин.
На поверхность частиц, в свою очередь, наносилось соединение биотина с полиэтиленгликолем, которое вступало во взаимодействие с авидином и препятствовало дальнейшему движению микроскопического «робота». Это соединение стало своеобразным искусственным рецептором, подобным тем, которые есть у микроорганизмов.
По словам Александра-Каца, хотя сейчас ученым удалось проверить свой метод только на смоделированной поверхности клетки, ничего не мешает их системе функционировать и в условиях живой ткани. Авторы работы считают, что с помощью этой технологии можно будет доставлять лекарственные препараты именно к раковым клеткам, которых микроскопические «роботы» станут выявлять по структуре их поверхности и некоторым другим особенностям.
Следующим этапом исследования станет проверка того, как система работает в комплексных условиях. Если изначально ученые выяснили ее работоспособность на плоских поверхностях, то теперь они хотят использовать для испытаний объемные объекты. Таким образом, проверка технологии будет проходить в условиях, максимально приближенных к имеющимся в организме живого существа.
поддержать проект
Подпишитесь на «Русскую Планету» в Яндекс.Новостях
Яндекс.Новости





